What is CAN Bus Telematics?
A plain-English guide for fleet managers and heavy machinery operators.
If you've been researching fleet telematics for your heavy machinery, you've probably come across the term "CAN bus" — and wondered what it actually means. This guide explains it in plain English, without the technical jargon.
What is CAN Bus?
CAN stands for Controller Area Network. It's a communication protocol developed by Bosch in the 1980s that allows different electronic components within a vehicle or machine to communicate with each other without a central computer.
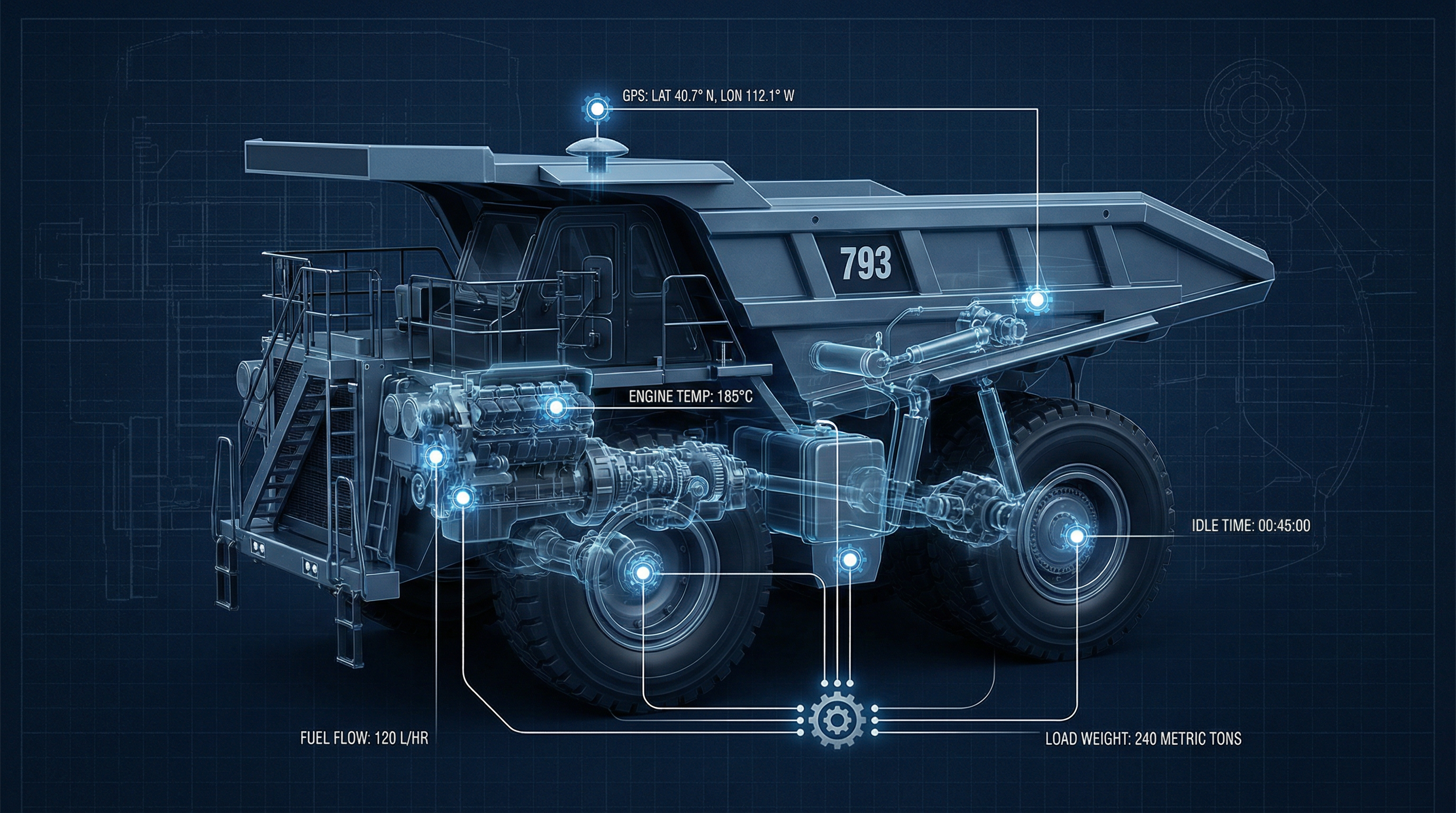
In a modern excavator, dozer, or haul truck, the CAN bus network connects dozens of electronic control units (ECUs) — the engine ECU, transmission ECU, hydraulic ECU, and more. These ECUs are constantly exchanging data: engine speed, coolant temperature, hydraulic pressure, fuel flow rate, and hundreds of other parameters.
CAN bus telematics taps into this network and reads that data in real time — then transmits it to a cloud platform where you can access it from any device, anywhere.
What Data Can You Get from CAN Bus?
The exact data available depends on the machine make, model, and year — but for most modern heavy machinery (Cat, Komatsu, Hitachi, Volvo, Liebherr), CAN bus telematics can provide:
- ✓Engine hours (actual operating time, not just ignition-on time)
- ✓Fuel consumption (litres per hour and total fuel used)
- ✓Idle time (engine running but machine not working)
- ✓Fault codes and diagnostic trouble codes (DTCs)
- ✓Engine RPM and load factor
- ✓Coolant temperature and oil pressure
- ✓DEF/AdBlue level and consumption
- ✓Hydraulic pressure and temperature
- ✓Battery voltage
- ✓Service interval status
Why Does This Matter for Fleet Managers?
The difference between GPS-only tracking and CAN bus telematics is the difference between knowing where your machine is and knowing how it's performing.
1. Accurate Engine Hours for Billing and Maintenance
Engine hours are the currency of heavy machinery — they determine when services are due, how you bill hire clients, and how you value assets for resale. GPS trackers estimate engine hours based on ignition-on time, which is inaccurate. CAN bus reads actual engine hours directly from the ECU — the same number your Cat or Komatsu dealer uses.
2. Fault Code Alerts Before Breakdowns
When a fault code is logged on a machine's ECU, CAN bus telematics can send you an instant SMS or email alert — before the operator even notices the warning light. This gives you the opportunity to investigate the issue before it becomes a breakdown on a critical path or production shift.
For mining operations, a single unplanned breakdown can cost $50,000–$200,000 in lost production. For civil contractors, a broken excavator can delay an entire project programme. Early fault code detection is one of the highest-ROI features of CAN bus telematics.
3. Idle Time Reduction
Idle time — engine running, machine not working — costs Australian and NZ operators $15–$40 per hour in fuel alone, depending on machine size. On a 20-machine fleet with 20% average idle time, that's $80,000–$120,000 per year in wasted fuel.
CAN bus telematics measures idle time accurately (GPS-only trackers can't distinguish idle from working). With this data, you can identify machines and operators with excessive idle, set targets, and track improvement over time. Pacific Fleet Systems clients typically reduce idle time by 15–25% in the first 90 days.
4. Predictive Maintenance
Service scheduling based on actual engine hours — not calendar time — is one of the most practical benefits of CAN bus telematics. When a machine reaches a service interval, the platform sends an automatic alert to your workshop or service provider. No more missed services, no more over-servicing.
CAN Bus vs OBDII vs J1939
You may also see references to OBDII and J1939 in telematics hardware specifications. Here's the difference:
Standard protocol for passenger vehicles and light commercial vehicles. Mandated in AU/NZ vehicles from 2006.
Heavy-duty vehicle standard used by most construction and mining equipment. Provides richer diagnostic data than OBDII.
Manufacturer-specific protocols used by Cat, Komatsu, Hitachi, and others. Requires brand-specific decoding.
Pacific Fleet Systems hardware supports all three protocols — CAN bus, OBDII, and J1939 — which means it works across your entire fleet, from light vehicles and utes to 300-tonne haul trucks.
How is CAN Bus Hardware Installed?
CAN bus telematics devices connect to the machine's diagnostic port — typically a 9-pin or 6-pin connector located in the cab or engine bay. Installation takes 30–60 minutes per machine and does not require any modification to the machine's wiring or systems. It does not void the manufacturer warranty.
Pacific Fleet Systems provides hardware supply and installation through our AU/NZ installation network. Typical deployment time is 5 business days from contract signing.
Summary
CAN bus telematics is the difference between knowing where your machine is and knowing how it's performing. For heavy machinery operators in Australia and New Zealand, the ROI from accurate engine hours, fault code alerts, idle time reduction, and predictive maintenance typically pays back the cost of the system within 3–6 months.
If you're evaluating fleet telematics for your operation, the key question to ask any provider is: "Do you read CAN bus data, or just GPS?" If the answer is just GPS, you're leaving most of the value on the table.
Get Started
See it working on your fleet.
Book a 15-minute demo. No commitment, no sales pressure — just live data from your asset types.